

연구개발

- 연구개발
- 연구 실적
연구 실적

고단적재 무인지게차 시스템 기술개발
연구 목표 : 무인지게차 제어시스템 기술개발
연구 기간 : 2011. 12 ~ 2014. 07
부처명 : 국토해양부
물류현장 작업자 본위의 보관시설 자동화 기술
연구 목표 : 로봇 제어 및 복수 로봇 운용 제어 시스템 개발
연구 기간 : 2014. 06 ~ 2018. 03
부처명 : 국토교통부
자율주행차량 사고 예방 및 회피를 위한 저가용 2D라이다(LiDAR)기술
연구 목표 : Laser Scanner 최종 상용제품 개발 및 성능 검증
연구 기간 : 2014. 10 ~ 2016. 09
부처명 : 중소기업청

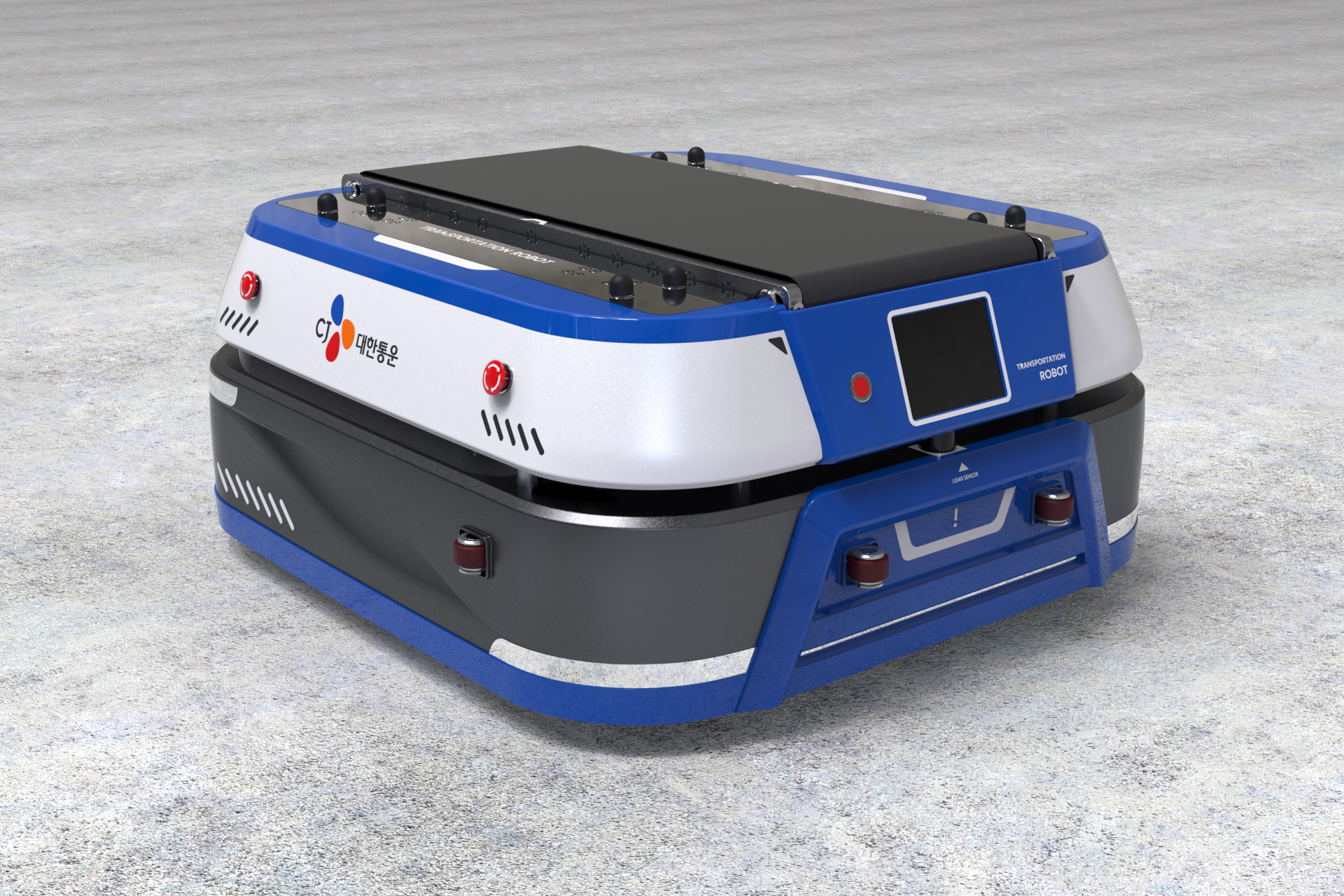
5G 기반 생산/물류관리 서비스 및 Cloud향
제조특화 ML 플랫폼 개발
연구 목표 : 공장 자동화를 위한 물류 이송 작업용 AMR
상세 설계 및 제작
연구 기간 : 2018. 04 ~ 2020. 12
부처명 : 과학기술정보통신부

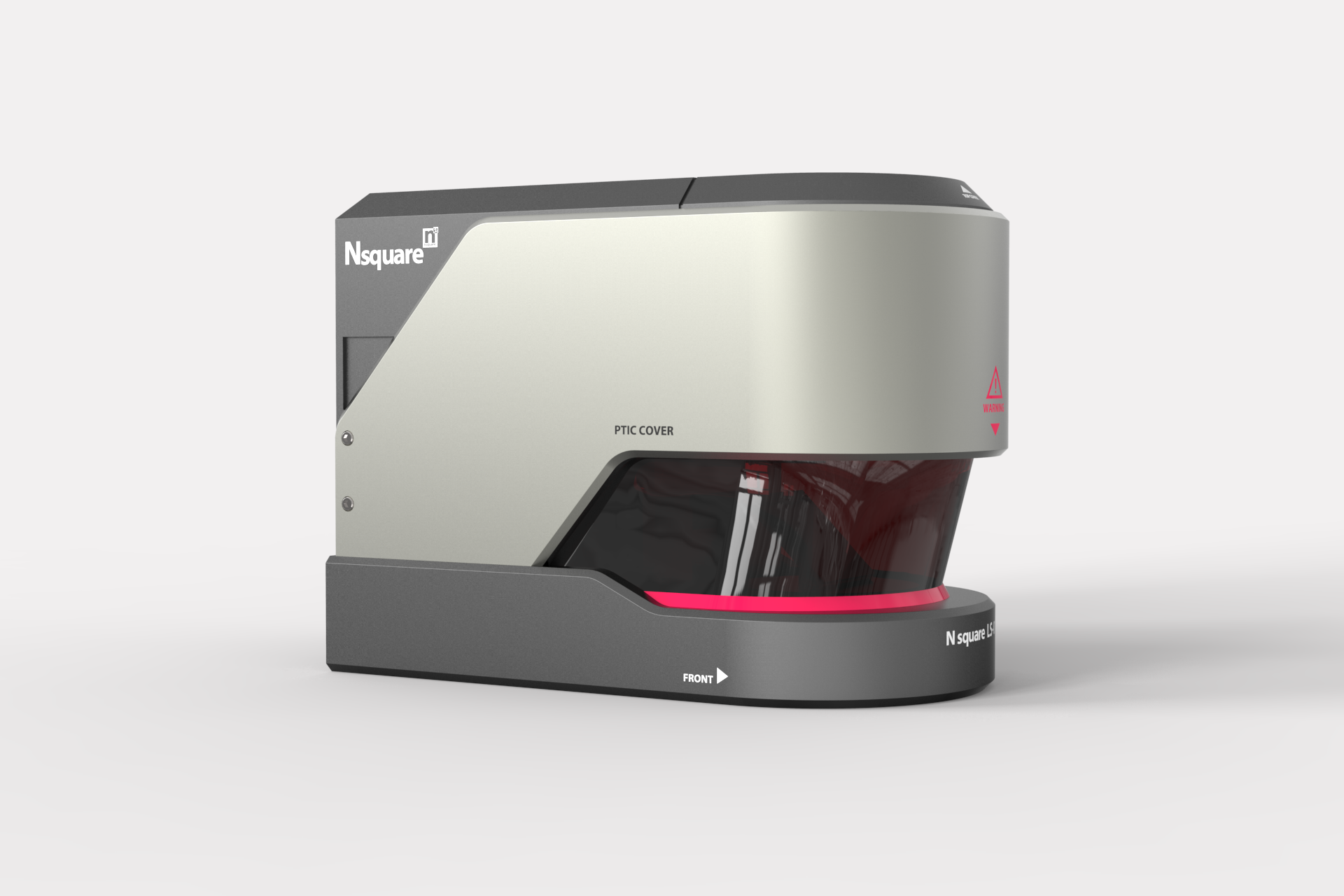
스마트 공장 자율이송로봇용 30m급
라이다 센서 제품개발
연구 목표 : 스마트 공장 자율이송로봇용 30m급 라이다 센서 제품개발
연구 기간 : 2018. 06 ~ 2019. 05
부처명 : 산업통상자원부

다중 IMU, LiDAR 및 카메라 센서 융합 기반
위치인식기술을 이용한 실내·외 전방위 구동
자율주행 운반차 개발
연구 목표 : 메카넘휠을 이용한 전방위 구동 자율주행 운반차
시제품 전장 및 제어
연구 기간 : 2018. 06. ~ 2021. 05.
부처명 : 산업통상자원부







회사주소 : 충남 천안시 직산읍 4산단5길 11-3 TEL : 041-587-0300 FAX : 041-587-0301
Copyright 2015. (주)엔스퀘어 All rights reserved.